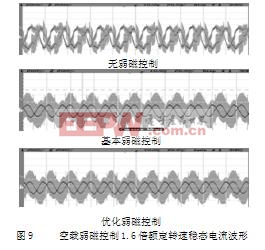
優(yōu)化弱磁控制
6.結論
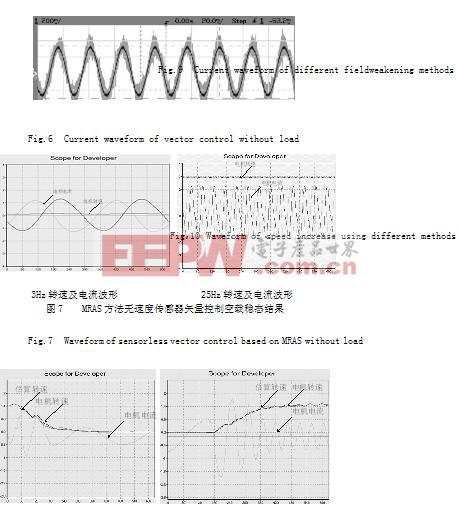
由于礦山機車(chē)工作環(huán)境的特殊性��,在設計礦山機車(chē)牽引電機矢量控制系統時(shí)必須考慮速度估算環(huán)節和弱磁控制環(huán)節��,基于MRAS方法的轉速估算方法可以同時(shí)估算電機的轉速和磁鏈信息�����,簡(jiǎn)化了系統結構���,較為適合應用于牽引電機矢量控制系統中�。優(yōu)化弱磁控制可以保證電機的最大轉矩輸出���,使電機有更好的帶載能力和更寬的運行范圍���,較為適合應用在對電機轉矩輸出要求較高的牽引電機矢量控制系統中�����。













評論