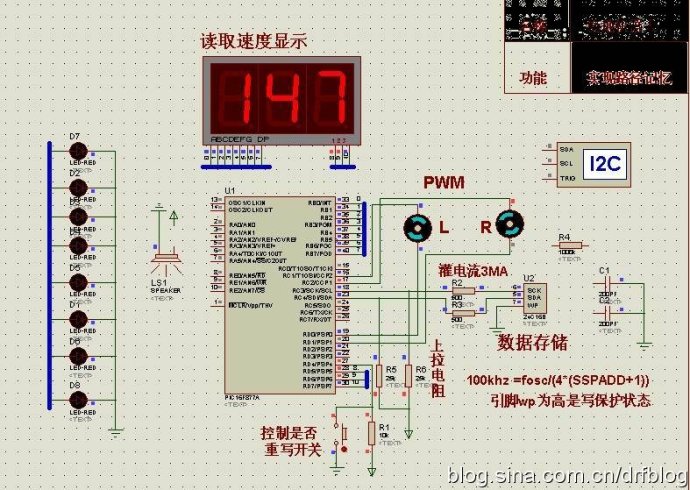
利用24CXXX系列E2PRAM存儲器實(shí)現機器人的路徑記憶����。 首先�,利用PIC16F877A單片機將機器人的路徑采集轉換成數據�,單片機進(jìn)行處理�。但是����,由于單片機RAM太小不能夠存儲大量的數據��。因此�,這里用24CXXX系列的存儲器存儲大量的數據�����,單片機實(shí)現的是對數據的采集和處理��。
本文引用地址:http://dyxdggzs.com/article/201611/321068.htm 此過(guò)程用的是PIC16F877A單片機的I2C協(xié)議�。
具體I2C使用如下:
1.寫(xiě)過(guò)程
(1)上電后等待一個(gè)延時(shí)(1ms)���。
(2)器件尋址�,給一個(gè)起始信號(SCL為高電平時(shí)SDA給一個(gè)下降沿)����。發(fā)送從器件地址��,高5位為10110�,然后根據A1/A0(如果和器件的地址相同則那個(gè)器件會(huì )應答)進(jìn)行讀/寫(xiě)控制(O為讀)���。
(3)應答���,器件在SCL的第9個(gè)周期時(shí)SDA給出一個(gè)低電平����,作為應答信號��。
(4)開(kāi)始寫(xiě)有兩種模式:字節寫(xiě)模式和頁(yè)寫(xiě)模式����。
·字節模式:給出A15~A8應答�����,給出A7~A0應答����;然后給出DATA和停止信號 (SCL為高電平時(shí)����,SDA給出一個(gè)上升沿)���,接著(zhù)要等待一個(gè)擦寫(xiě)時(shí)間��。
·頁(yè)寫(xiě)模式:給出地址以后連續給出64個(gè)數據����。如果多于64個(gè)數據��,則地址計數器自動(dòng)翻轉�����。(如果少于64昵���,估計是沒(méi)有問(wèn)題的�����,但是需要實(shí)驗驗證���。)
(5)判斷擦寫(xiě)操作是否完畢的一個(gè)方法(應答查詢(xún))�,如果器件還處于擦寫(xiě)狀態(tài)����,則不會(huì )應答器件尋址�����;如果有應答�����,則說(shuō)明擦寫(xiě)完畢�����。
2.讀過(guò)程
(1)上電以后等待一個(gè)延時(shí)(lms)�。
(2)器件尋址�。
(3)應答�����。
(4)開(kāi)始讀有三種模式:立即當前地址讀��、選擇/隨機讀�、連續讀��。
·立即當前地址讀:如果上次讀/寫(xiě)的操作地址為N�,則現在是N+1���。不需要ACK�,但是需要Stop信號�。
·選擇/隨機讀:先偽寫(xiě)(用于給出一個(gè)地址)���,然后再次啟動(dòng)����,讀取數據����。
·連續讀:讀取一個(gè)以后給一個(gè)應答���,這樣器件會(huì )再給出下一個(gè)地址的數據內容���。
(5)開(kāi)始數據傳輸Start后��、停止數據傳輸Stop前�����,SCL高電平期間����,SDA上為有效數據�。
最終實(shí)現的效果
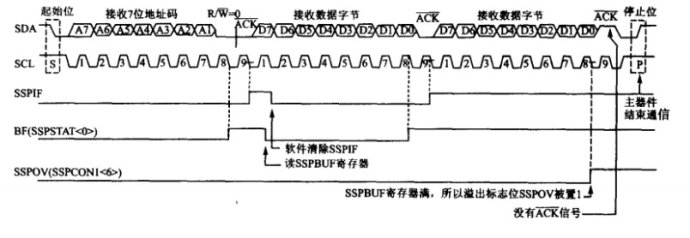
I2C模式7位尋址數據接收過(guò)程時(shí)序圖


評論