#include "linux/errno.h"#include"linux/kernel.h"
#include"linux/module.h"
#include"linux/slab.h"
#include"linux/input.h"
#include"linux/init.h"
#include"linux/serio.h"
#include"linux/delay.h"
#include"linux/platform_device.h"
#include"linux/clk.h"
#include"asm/io.h"
#include"asm/irq.h"
#include"asm/plat-s3c24xx/ts.h"
#include"asm/arch/regs-adc.h"
#include"asm/arch/regs-gpio.h"
struct s3c_ts_regs {
unsigned long adccon;
unsigned long adctsc;
unsigned long adcdly;
unsigned long adcdat0;
unsigned long adcdat1;
unsigned long adcupdn;
};
static struct input_dev *s3c_ts_dev;
static volatile struct s3c_ts_regs *s3c_ts_regs;
static struct timer_list ts_timer;
//等到觸控筆按下模式
static void enter_wait_pen_down_mode(void)
{
s3c_ts_regs->adctsc = 0xd3;
}
//等到觸控筆松開(kāi)模式
static void enter_wait_pen_up_mode(void)
{
s3c_ts_regs->adctsc = 0x1d3;
}
//進(jìn)入X/Y方向ADC同時(shí)轉換模式
static void enter_measure_xy_mode(void)
{
s3c_ts_regs->adctsc = (1<<3)|(1<<2);
}
//啟動(dòng)ADC轉換
static void start_adc(void)
{
s3c_ts_regs->adccon |= (1<<0);
}
static int s3c_filter_ts(int x[], int y[])
{
#define ERR_LIMIT 10
int avr_x, avr_y;
int det_x, det_y;
avr_x = (x[0] + x[1])/2;
avr_y = (y[0] + y[1])/2;
det_x = (x[2] > avr_x) ? (x[2] - avr_x) : (avr_x - x[2]);
det_y = (y[2] > avr_y) ? (y[2] - avr_y) : (avr_y - y[2]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))
return 0;
avr_x = (x[1] + x[2])/2;
avr_y = (y[1] + y[2])/2;
det_x = (x[3] > avr_x) ? (x[3] - avr_x) : (avr_x - x[3]);
det_y = (y[3] > avr_y) ? (y[3] - avr_y) : (avr_y - y[3]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))
return 0;
return 1;
}
static void s3c_ts_timer_function(unsigned long data)
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
// 已經(jīng)松開(kāi)
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
// 測量X/Y坐標
enter_measure_xy_mode();
start_adc();
}
}
//觸控筆按下����、抬起中斷服務(wù)函數
static irqreturn_t pen_down_up_irq(int irq, void *dev_id)
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
//printk("pen upn");
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
//printk("pen downn");
//enter_wait_pen_up_mode();
enter_measure_xy_mode();
start_adc();
}
return IRQ_HANDLED;
}
static irqreturn_t adc_irq(int irq, void *dev_id)
{
static int cnt = 0;
static int x[4], y[4];
int adcdat0, adcdat1;
// 優(yōu)化措施2: 如果ADC完成時(shí), 發(fā)現觸摸筆已經(jīng)松開(kāi), 則丟棄此次結果
adcdat0 = s3c_ts_regs->adcdat0;
adcdat1 = s3c_ts_regs->adcdat1;
if (s3c_ts_regs->adcdat0 & (1<<15))
{
// 已經(jīng)松開(kāi)
cnt = 0;
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
// printk("adc_irq cnt = %d, x = %d, y = %dn", ++cnt, adcdat0 & 0x3ff, adcdat1 & 0x3ff);
// 優(yōu)化措施3: 多次測量求平均值
x[cnt] = adcdat0 & 0x3ff;
y[cnt] = adcdat1 & 0x3ff;
++cnt;
if (cnt == 4)
{
// 優(yōu)化措施4: 軟件過(guò)濾
if (s3c_filter_ts(x, y))
{
//printk("x = %d, y = %dn", (x[0]+x[1]+x[2]+x[3])/4, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_X, (x[0]+x[1]+x[2]+x[3])/4);
input_report_abs(s3c_ts_dev, ABS_Y, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 1);
input_report_key(s3c_ts_dev, BTN_TOUCH, 1);
input_sync(s3c_ts_dev);
}
cnt = 0;
enter_wait_pen_up_mode();
// 啟動(dòng)定時(shí)器處理長(cháng)按/滑動(dòng)的情況
mod_timer(&ts_timer, jiffies + HZ/100);
}
else
{
enter_measure_xy_mode();
start_adc();
}
}
return IRQ_HANDLED;
}
static int s3c_ts_init(void)
{
struct clk* clk;
// 1. 分配一個(gè)input_dev結構體
s3c_ts_dev = input_allocate_device();
// 2. 設置
// 2.1 能產(chǎn)生哪類(lèi)事件
set_bit(EV_KEY, s3c_ts_dev->evbit); //按鍵類(lèi)事件
set_bit(EV_ABS, s3c_ts_dev->evbit); //絕對位移類(lèi)事件
// 2.2 能產(chǎn)生這類(lèi)事件里的哪些事件
set_bit(BTN_TOUCH, s3c_ts_dev->keybit);
input_set_abs_params(s3c_ts_dev, ABS_X, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0);//按壓力度:1表示按下�、0松開(kāi)
// 3. 注冊
input_register_device(s3c_ts_dev);
// 4. 硬件相關(guān)的操作
//4.1 使能時(shí)鐘(CLKCON[15])
clk = clk_get(NULL, "adc");
clk_enable(clk);
// 4.2 設置S3C2440的ADC/TS寄存器
s3c_ts_regs = ioremap(0x58000000, sizeof(struct s3c_ts_regs));
//bit[14] : 1-A/D converter prescaler enable
* bit[13:6]: A/D converter prescaler value,
* 49, ADCCLK=PCLK/(49+1)=50MHz/(49+1)=1MHz
* bit[0]: A/D conversion starts by enable. 先設為0
//
s3c_ts_regs->adccon = (1<<14)|(49<<6);
request_irq(IRQ_TC, pen_down_up_irq, IRQF_SAMPLE_RANDOM, "ts_pen", NULL);
request_irq(IRQ_ADC, adc_irq, IRQF_SAMPLE_RANDOM, "adc", NULL);
// 優(yōu)化措施1:
// 設置ADCDLY為最大值, 這使得電壓穩定后再發(fā)出IRQ_TC中斷
s3c_ts_regs->adcdly = 0xffff;
//優(yōu)化措施5: 使用定時(shí)器處理長(cháng)按,滑動(dòng)的情況
init_timer(&ts_timer);
ts_timer.function = s3c_ts_timer_function;
add_timer(&ts_timer);
enter_wait_pen_down_mode();
return 0;
}
static void s3c_ts_exit(void)
{
free_irq(IRQ_TC, NULL);
free_irq(IRQ_ADC, NULL);
iounmap(s3c_ts_regs);
input_unregister_device(s3c_ts_dev);
input_free_device(s3c_ts_dev);
del_timer(&ts_timer);
}
module_init(s3c_ts_init);
module_exit(s3c_ts_exit);
MODULE_LICENSE("GPL");
================================================================
解析:
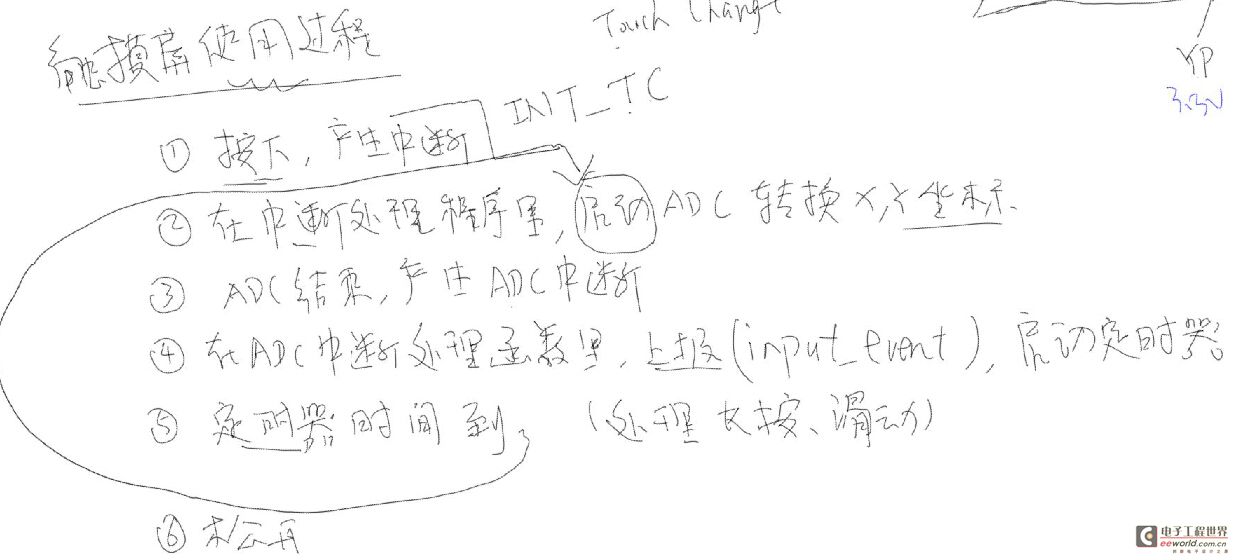
加載驅動(dòng)以后運行s3c_ts_init函數��,程序進(jìn)入等待觸控筆按下模式enter_wait_pen_down_mode()����,當有觸控筆按下時(shí)進(jìn)入按下中斷服務(wù)函數中運行���,即pen_down_up_irq中�,進(jìn)入中斷服務(wù)函數后立即判斷觸控筆是否依然按下�,如果這個(gè)時(shí)候觸控筆已經(jīng)松開(kāi)則上報事件���;若此時(shí)觸控筆依然按下則進(jìn)入X/Y雙方向同時(shí)進(jìn)行ADC轉換模式��,并啟動(dòng)ADC轉換����。當ADC轉換完成以后進(jìn)入ADC中斷服務(wù)程序�,從adcdat0�����、adcdat1獲取到x方向�、y方向的ADC數據����,再判斷觸控筆是否離開(kāi)���,如果已經(jīng)離開(kāi)則進(jìn)行上報數據�;否則保存此次ADC轉換數據再判斷ADC采集到的數據有沒(méi)有到4次����,如果累計到4次則進(jìn)行軟件濾波后上報事件����,進(jìn)入等待觸控筆離開(kāi)模式enter_wait_pen_up_mode��,同時(shí)啟動(dòng)定時(shí)器開(kāi)始計時(shí)處理連續按壓事件�;如果不夠4次則再次進(jìn)入X/Y雙方向同時(shí)進(jìn)行ADC轉換模式�����,并啟動(dòng)ADC轉換��。當定時(shí)時(shí)間到了以后進(jìn)入定時(shí)中斷服務(wù)函數里���,判斷觸控筆是否離開(kāi)���,如果觸控筆松開(kāi)則上報事件�,進(jìn)入等待觸控筆按下模式�����,否則再次進(jìn)入X/Y雙方向同時(shí)進(jìn)行ADC轉換模式�,并啟動(dòng)ADC轉換�。依次�����!
測試2th~7th:
1. make menuconfig 去掉原來(lái)的觸摸屏驅動(dòng)程序
-> Device Drivers
-> Input device support
-> Generic input layer
-> Touchscreens
<> S3C2410/S3C2440 touchscreens
make uImage
使用新內核啟動(dòng)
2. insmod s3c_ts.ko
按下/松開(kāi)觸摸筆
測試2th~7th:
1. ls /dev/event*
2. insmod s3c_ts.ko
3. ls /dev/event*
4. hexdump /dev/event0
秒 微秒 type code value
0000000 29a4 0000 8625 0008 0003 0000 0172 0000
0000010 29a4 0000 8631 0008 0003 0001 027c 0000
0000020 29a4 0000 8634 0008 0003 0018 0001 0000
0000030 29a4 0000 8638 0008 0001 014a 0001 0000
0000040 29a4 0000 863c 0008 0000 0000 0000 0000
0000050 29a4 0000 c85e 0008 0003 0000 0171 0000
0000060 29a4 0000 c874 0008 0003 0001 027d 0000
0000070 29a4 0000 c87b 0008 0000 0000 0000 0000
0000080 29a4 0000 ed37 0008 0003 0018 0000 0000
0000090 29a4 0000 ed48 0008 0001 014a 0000 0000
00000a0 29a4 0000 ed4a 0008 0000 0000 0000 0000
lcd和觸摸屏聯(lián)合使用參考”tslib編譯使用方法“
//暫時(shí)忽略下面三行命令
//sudo apt-get install autoconf
//sudo apt-get install automake
//sudo apt-get install libtool
編譯:
tar xzf tslib-1.4.tar.gz
cd tslib
./autogen.sh
mkdir tmp
echo "ac_cv_func_malloc_0_nonnull=yes" >arm-linux.cache
./configure --host=arm-linux --cache-file=arm-linux.cache --prefix=$(pwd)/tmp
make
make install //安裝到tmp目錄
安裝:
cd tmp
再把tmp目錄下的4個(gè)文件全都拷貝到開(kāi)發(fā)板的根目錄下
cp * /home/book/workspace/JZ2440_TestFile/system/first_fs-rfd
(采用網(wǎng)絡(luò )文件系統啟動(dòng)時(shí)開(kāi)發(fā)板的根目錄�����,但是此時(shí)并沒(méi)有拷貝到開(kāi)發(fā)板的flash上面���,如果要拷貝到開(kāi)發(fā)板的flash上面可以不用網(wǎng)絡(luò )文件系統啟動(dòng)��,采用手動(dòng)掛載的方式把文件系統掛載到開(kāi)發(fā)板的mnt目錄下�,在從mnt目錄下把tmp里的文件拷貝到開(kāi)發(fā)板的根目錄下面��,這樣就算真正的在開(kāi)發(fā)板的flash上面了��。)
使用:
先安裝s3c_ts.ko, lcd.ko
1.
修改 /etc/ts.conf第1行(去掉#號和第一個(gè)空格):
# module_raw input
改為:
module_raw input
2.設置環(huán)境變量
export TSLIB_TSDEVICE=/dev/event0
export TSLIB_CALIBFILE=/etc/pointercal
export TSLIB_CONFFILE=/etc/ts.conf
export TSLIB_PLUGINDIR=/lib/ts
export TSLIB_CONSOLEDEVICE=none
export TSLIB_FBDEVICE=/dev/fb0
使用以下兩個(gè)命令進(jìn)行測試:
ts_calibrate
ts_test


評論