嵌入式智能射頻光傳輸模塊設計

3.3 數據收發(fā)程序設計[5]
數據的收發(fā)包括:?jiǎn)纹瑱C接收上位機數據,單片機向上位機發(fā)送數據,單片機接收CC1000數據和單片機向CC1000發(fā)送數據。這里僅討論單片機通過(guò)串口1接收中斷接收CC1000數據過(guò)程,這是整個(gè)數據收發(fā)程序設計中的難點(diǎn)。
本設計中,單片機與CC1000之間采用曼徹斯特同步模式進(jìn)行數據的接收和發(fā)送。在發(fā)射模式下(單片機向CC1000發(fā)送數據),PCLK提供發(fā)送數據時(shí)鐘信號,DIO用于數據輸入,CC1000 自動(dòng)完成對數據的譯碼。在接收模式下,PCLK 提供接收數據時(shí)鐘信號,在DIO提供數據,CC1000自動(dòng)完成數據編碼和同步工作。
(1)數據幀結構
在曼徹斯特同步模式下,數據幀由訓練碼、同步碼、前導碼和有效數據構成。在本設計中,訓練碼為連續交替出現的0 和1,共40個(gè);同步碼為連續出現的8個(gè)0;前導碼為連續的8個(gè)1。當數據中出現符合前面所有格式數據時(shí),接下來(lái)的數據就是要接收的有效數據。當數據符合幀格式時(shí),單片機才認為該數據為合格數據,從而進(jìn)行接收,這樣可以保證接收數據的準確性,降低傳輸誤碼率。
(2)串口1接收中斷服務(wù)程序
在通信過(guò)程中CC1000 具有3 種狀態(tài):IDLE(空閑)、RX(接收數據)、TX(發(fā)送數據)。由于CC1000與單片機之間是半雙工模式通信,因而RX 與TX 兩狀態(tài)要互斥。數據的接收由串口中斷完成:UART0接收中斷接收來(lái)自上位機的數據,UART1接收中斷則接收來(lái)自CC1000的數據。UART1中斷服務(wù)程序數據傳輸流程如圖6所示。在接收過(guò)程中,為了避免數據幀長(cháng)度過(guò)長(cháng),當接收的有效數據超過(guò)緩沖區空間時(shí),單片機判定此幀無(wú)效。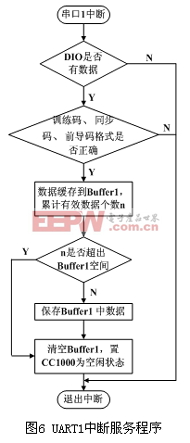
3.4 參數監測與控制
單片機通過(guò)A/D轉換完成對參數的采集和數字化,這一過(guò)程由定時(shí)器中斷完成。監測數據被存儲,并通過(guò)PC機顯示出來(lái)。增益控制和偏置電壓則通過(guò)單片機的D/A轉換來(lái)控制。有關(guān)這方面的軟件設計,由于篇幅有限,這里不再贅述。
4.總結<dfn id="yhprb"><s id="yhprb"></s></dfn> <dfn id="yhprb"><delect id="yhprb"></delect></dfn> <dfn id="yhprb"></dfn> <dfn id="yhprb"><delect id="yhprb"></delect></dfn> <dfn id="yhprb"></dfn> <dfn id="yhprb"><s id="yhprb"><strike id="yhprb"></strike></s></dfn> <small id="yhprb"></small> <dfn id="yhprb"></dfn> <small id="yhprb"><delect id="yhprb"></delect></small> <small id="yhprb"></small> <small id="yhprb"></small> <delect id="yhprb"><strike id="yhprb"></strike></delect> <dfn id="yhprb"></dfn> <dfn id="yhprb"></dfn> <s id="yhprb"><noframes id="yhprb"> <small id="yhprb"><dfn id="yhprb"></dfn></small> <dfn id="yhprb"><delect id="yhprb"></delect></dfn> <small id="yhprb"></small> <dfn id="yhprb"><delect id="yhprb"></delect></dfn> <dfn id="yhprb"><s id="yhprb"></s></dfn> <small id="yhprb"></small> <delect id="yhprb"><strike id="yhprb"></strike></delect> <dfn id="yhprb"><s id="yhprb"></s></dfn> <dfn id="yhprb"></dfn> <dfn id="yhprb"><s id="yhprb"></s></dfn> <dfn id="yhprb"><s id="yhprb"><strike id="yhprb"></strike></s></dfn> <dfn id="yhprb"><s id="yhprb"></s></dfn>
嵌入式智能光模塊可以實(shí)現直放站近端機和遠端機的遠程光纖通信,在此基礎上,PC 機只需通過(guò)RS232/485總線(xiàn)與近端機通信,便可完成對近端機和遠端機的實(shí)時(shí)監控,方便工作人員對直放站的調試和維護。經(jīng)測試,CC1000之間的FSK通信在20dB 光衰條件下的誤幀率優(yōu)于0.1%,保證了監控的可靠性。
国产精品自在自线亚洲|国产精品无圣光一区二区|国产日产欧洲无码视频|久久久一本精品99久久K精品66|欧美人与动牲交片免费播放
linux操作系統文章專(zhuān)題:linux操作系統詳解(linux不再難懂)

相關(guān)推薦





技術(shù)專(zhuān)區
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線(xiàn)
- 開(kāi)關(guān)電源
- 單片機
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開(kāi)發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機控制
- 藍牙
- PLC
- PWM
- 汽車(chē)電子
- 轉換器
- 電源管理
- 信號放大器
評論